 Institutsteil für industrielle Automation INA
Institutsteil für industrielle Automation INA 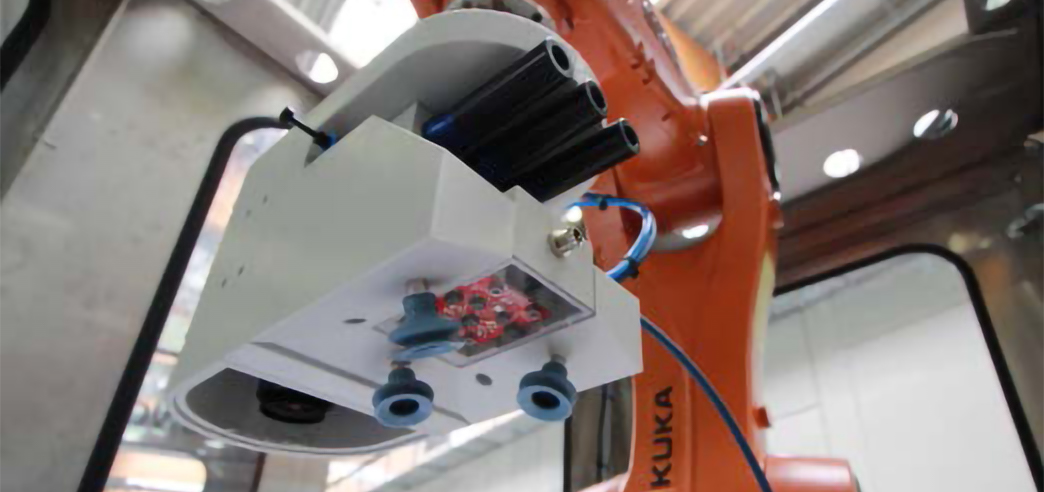
Flexible Robotergreifer zum Erkennen, Greifen und Prüfen natürlicher Objekte im Industrie-4.0-Umfeld (I4KMU-FlexRoG)
Zusammenfassung
In der industriellen Produktion ist die automatische Beurteilung und Sortierung von Bauteilen und Produkten ein Standardverfahren. Abhängig von der Komplexität der Qualitätskriterien und der Beschaffenheit der Produkte variieren die Technologien in Komplexität und Kosten. Die Kooperation zwischen dem Fraunhofer IOSB-INA und dem Sondermaschinenbauer Anlagenbau Habeck GmbH & Co. KG zeigt, wie sich die Qualitätskontrolle effizient automatisieren lässt.
Herausforderung


Es braucht ein geschultes Auge, um die Qualität von Lebensmittel zu beurteilen.
Neben Form, Konsistenz, Farbe, Textur spielen viele Faktoren eine Rolle.
Die zentrale Herausforderung des Projekts war die Entwicklung einer automatisierten, roboterunterstützten Qualitätskontrolle, die auch für kleine und mittelständische Unternehmen (KMU) finanziell attraktiv ist. Bereits vorhandene Technologien, die für die mechanische Fertigung von Produkten oder Produktkomponenten ausgelegt sind, kamen für die Zielgruppe und den spezifischen Anwendungsfall nicht infrage. Ziel war es daher, eine niederschwellige Lösung zu schaffen, die ihre Flexibilität aus der Kombination verschiedener Domänen wie intelligente Sensorsysteme, maschinelles Lernen und innovativen Anlagenbau bezieht. Der hohe Kostenaufwand für die Implementierung und Programmierung von Robotern ist ein wesentliches Hindernis für KMU. Roboter erfordern spezifische Endeffektoren und die Fähigkeit, flexibel auf wechselnde Produktionsanforderungen reagieren zu können, was die Kosten weiter erhöht.
Zielsetzung & Herangehensweise

Exemplarisches Anwendungsszenario: Ein Vakkumgreifer soll unterschiedliche, organische Objekte greifen und in einem Arbeitsschritt auf
Qualitätsmerkmale prüfen.
Das Projekt „Flexible Robotergreifer zum Erkennen, Greifen und Prüfen natürlicher Objekte im Industrie-4.0-Umfeld (I4KMU-FlexRoG)“ zielt darauf ab, die Programmieraufwände, die mechanischen Begrenzungen des Greifers und die Funktionsflexibilisierung durch eine Schlüsselkombination aus Robotik, Deep Learning und maschinellem Lernen deutlich zu verbessern. Die Firma Habeck entwickelt ein spezifisches Robotergreifsystem, das verschiedene Greifobjekte handhaben und deren Qualität während der Handhabung prüfen kann. Eine automatisierte und prozessstabile Objekterkennung soll den Programmieraufwand verringern. Das Hauptanwendungsgebiet ist das Greifen und Prüfen von Kartoffeln in der Lebensmittelindustrie, wobei die Technologie auch auf andere Obst- und Gemüsesorten übertragbar sein soll. Diese flexible, leicht umrüstbare Technologie soll einmalige Entwicklungskosten für unterschiedliche Einsatzszenarien schnell amortisieren, um eine für den Mittelstand attraktive Lösung zu bieten. Durch die Kombination von Fraunhofer Forscherkompetenz und Habecks Entwicklerwissen entsteht eine branchenübergreifende Lösung für die Qualitätskontrolle in der Lebensmittelindustrie.
Ergebnisse & Werte
Im Projekt wurden mehrere Key-Performance-Indikatoren (KPI) definiert:
- Der flexible Greifer soll mit Knickarmrobotern herstellerunabhängig kombinierbar sein, um als Nachrüstlösung für bestehende Robotersysteme zu fungieren.
- Die Roboterprogrammierung soll durch eine Positions- und Objekterkennung vereinfacht werden, die die Lage des Werkstücks selbständig bestimmt.
- Der Greifer soll Werkstücke im Rahmen einer Inline-Qualitätskontrolle analysieren können, um Roboter direkt für Sortieraufgaben einzusetzen.
Ein erster Prototyp des Greifers, der auf dem Vakuumprinzip basiert, wurde entwickelt. Dieser kann unterschiedliche Werkstücke handhaben, wurde aber noch nicht herstellerübergreifend kombiniert und verfügte nicht über die nötige Sensorik. Aktuell wird der Greifer weiterentwickelt, um ihn mit Robotern in Industrie-4.0-Umgebungen einsetzen zu können. Sensoren auf Basis optischer Technologien werden integriert, um die Herstellerunabhängigkeit, Positionserkennung und Inline-Qualitätskontrolle zu realisieren. Ein Testbed in der SmartFactoryOWL in Lemgo dient als Entwicklungsumgebung.
Kundennutzen
Die entwickelte Lösung bietet KMU eine wirtschaftlich attraktive Möglichkeit, von den Vorteilen der Robotik zu profitieren. Der flexible Greifer ermöglicht eine schnelle Amortisation durch die Wiederverwendbarkeit in verschiedenen Szenarien und Anwendungen. In der Lebensmittelindustrie, wo Roboter bisher hauptsächlich für Transport, Palettieren und Verpacken verwendet werden, kann die neue Technologie auch für die Qualitätsprüfung eingesetzt werden. Dies ermöglicht eine Effizienzsteigerung und Kostensenkung. Durch die geringeren Programmieraufwände und die Flexibilität des Greifers können Unternehmen schneller auf wechselnde Anforderungen reagieren. Die Lösung fördert die Implementierung fortschrittlicher Technologien wie Deep Learning und maschinelles Lernen in KMU, wodurch diese von den Effizienzgewinnen der Industrie 4.0 profitieren können. Die praktische Übertragbarkeit auf andere Produkte und Branchen bei geringem Installationsaufwand schafft zusätzliche Potenziale für die industrielle Anwendung. Insgesamt bietet das Projekt eine vielversprechende Perspektive für die Einführung kosteneffizienter und flexibler Qualitätskontrolllösungen in der Lebensmittelbranche und darüber hinaus.